- Kein Sender ist aktiv
- Die Busleitung ist unterbrochen worden (z.B. Leitungsbruch)
- Die Busleitung ist kurzgeschlossen (z.B. Leitung beschädigt etc.)
Der RS485-Bus muss unter diesen Bedingungen in einen definierten Signalzustand gebracht werden. Einige Kommunikationsbusse haben diese Probleme nicht, da hier z.B. nur ein Sender existiert, welcher die Leitung steuert. Entweder der Sender ist aktiv oder eben nicht. Beim RS485-Bus, da multipointfähig, können aber mehrere Sender angeschlossen werden.
Damit der Signalzustand unter den obigen Bedingungen eindeutig wird, verwendet man in der Regel einen „Pull up“-Widerstand zwischen +5 V und der Signalleitung A und einen „Pull down“-Widerstand zwischen GND und der Signalleitung B. Die Widerstände sind theoretisch an einer beliebigen Stelle im Bus platzierbar, werden aber in der Regel beim Master in einem Spannungsteilerverbund mit Abschlusswiderstand eingesetzt, da es hierfür fertige Stecker gibt.
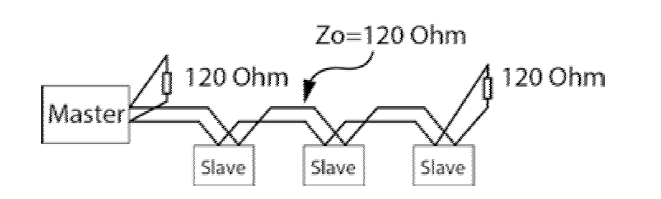
Bei einigen Herstellern findet man in der Regel nur die Empfehlung, einen Abschlusswiderstand am Anfang und am Ende einzubauen, damit Reflexionen vermieden werden (siehe Abschnitt Terminierung bzw. Busaufbau UMG 604 mit UMG 103). Warum ist das so?
In diesem Fall haben die Hersteller für die RS485-Schnittstelle Transceiver verwendet, die bereits einen internen Failsafe Bias im Chip eingebaut haben, d.h., bei z.B. 0 V am Receiver-Eingang hat der Ausgang automatisch einen logischen „High“-Zustand. Bei Maxim (wie im UMG 604 und UMG 103 eingesetzt) heißt die Funktion „True fail-safe“. Ein externer Failsafe Bias ist dann nur noch notwendig, wenn am gleichen Bus Teilnehmer angeschlossen werden, die diese Funktion nicht besitzen. Die Buslast wird im Übrigen durch die „True fail-safe“-Funktion nicht beeinflusst.